

技術(shù)小課堂丨雙軸四通道伺服控制系統(tǒng)研究

雙軸四通道
伺服控制系統(tǒng)研究
· 簡(jiǎn)介
本文介紹了雙軸四通道伺服控制系統(tǒng)的基本原理,給出了系統(tǒng)的難點(diǎn)、硬件架構(gòu)、控制原理,并詳細(xì)闡述了單通道獨(dú)立控制及多通道原位控制方式。
雙軸四通道試驗(yàn)系統(tǒng)(如圖 1 所示)既可實(shí)現(xiàn)多軸同步加載,又可進(jìn)行單軸獨(dú)立加載,廣泛應(yīng)用于力學(xué)性能測(cè)試、工程材料性能測(cè)試、構(gòu)件形變分析等領(lǐng)域。目前,該系統(tǒng)結(jié)構(gòu)主要有伺服電機(jī)和液壓作動(dòng)器兩種驅(qū)動(dòng)方式。伺服電機(jī)控制精度高.適合于小載荷、低頻響試驗(yàn);液壓作動(dòng)器雖然控制精度低于伺服電機(jī).但載荷大,頻響高。如果采用靜壓作動(dòng)器.4 個(gè)通道均可滿足 100Hz 以上的試驗(yàn)需求。
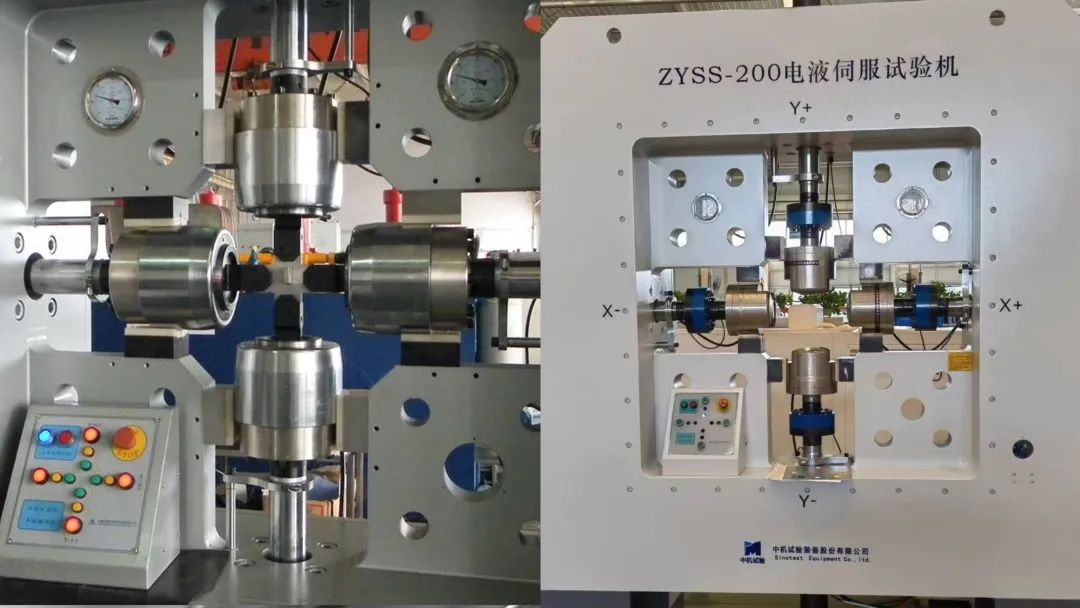
圖1 雙軸四通道試驗(yàn)系統(tǒng)
雙軸四通道伺服控制系統(tǒng)的主要技術(shù)難點(diǎn)在于原位控制技術(shù).在多軸同步運(yùn)行時(shí),確保試樣中心點(diǎn)不變,保證X軸及Y軸方向上 4 個(gè)驅(qū)動(dòng)器中心定位精度。本文通過(guò)對(duì)控制系統(tǒng)進(jìn)行研究.結(jié)合上位機(jī)和下位機(jī)技術(shù)特點(diǎn),對(duì)控制器硬件及軟件均采用模塊化設(shè)計(jì).既可實(shí)現(xiàn)對(duì)伺服電機(jī)控制,也可實(shí)現(xiàn)對(duì)液壓作動(dòng)器的控制。
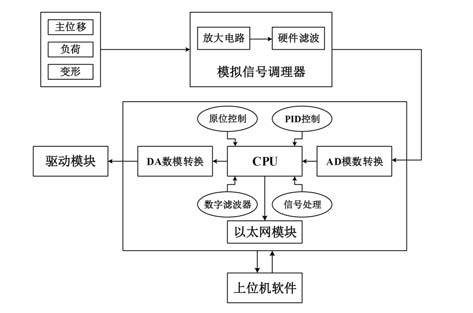
圖2 硬件架構(gòu)框圖
國(guó)內(nèi)雙軸四通道試驗(yàn)設(shè)備的控制系統(tǒng),早期以模擬電路為主,配合單片機(jī)數(shù)字采集部分,形成一套完整的控制體系包括放大器、單片機(jī)智能采集及函數(shù)發(fā)生等部分。上位機(jī)采用 VB4 平臺(tái),通過(guò) RS232 接口向下位機(jī)傳送命令參數(shù)。后期升級(jí)為數(shù)字控制系統(tǒng).采用兩臺(tái)計(jì)算機(jī),其中一臺(tái)計(jì)算機(jī)運(yùn)行上位機(jī)軟件,與第一代伺服系統(tǒng)類似:另一臺(tái)計(jì)算機(jī)運(yùn)行 DOS 系統(tǒng),負(fù)責(zé)上下位機(jī)的接口及多通道任務(wù)管理。伺服控制系統(tǒng)由基于兩套 PCI 接口的數(shù)字控制器組成,每套控制器自帶兩路伺服控制。兩路伺服系統(tǒng)通過(guò) DOS 進(jìn)行統(tǒng)一管理.進(jìn)而組成一套完整的雙軸四通道伺服控制系統(tǒng)。
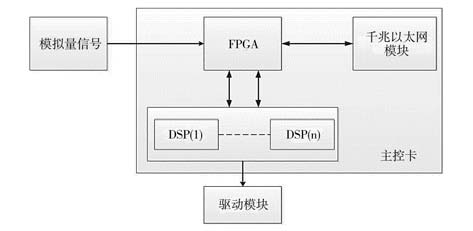
圖3 分布式控制框圖
本文研究的控制系統(tǒng)在設(shè)計(jì)上采用國(guó)際流行的分布式系統(tǒng)結(jié)構(gòu),采用FPCA作為中樞接口,結(jié)合 TMS320F28335 處理器.共同作為硬件主控模塊。驅(qū)動(dòng)部分同樣采用模塊化設(shè)計(jì)方式,在不提高成本的基礎(chǔ)上,可以兼容伺服電機(jī)及液壓作動(dòng)器兩種驅(qū)動(dòng)方式。硬件系統(tǒng)主要包括傳感器采集、放人部分AD 模數(shù)轉(zhuǎn)換部分,主控CPU 及DA數(shù)模轉(zhuǎn)換等(如圖2 所示)。采用百兆以太網(wǎng)接口方式與上位機(jī)進(jìn)行通信,增強(qiáng)了數(shù)據(jù)傳輸?shù)姆€(wěn)定性,也提高了數(shù)據(jù)傳輸速度。
測(cè)量部分主要包括 4 個(gè)負(fù)荷傳感器4 個(gè)主位移傳感器及 4個(gè)小量程位移傳感器。其中,負(fù)荷傳感器與主位移傳感器為兩個(gè)控制通道,小量程位移傳感器的信號(hào)主要用于原位控制算法。在試驗(yàn)過(guò)程中,為確保足夠高的采樣頻率及控制頻率,采用 FPGA作為核心元器件進(jìn)行高速采集.并將位移負(fù)荷及小位移等傳感器數(shù)據(jù)同步傳輸?shù)紻SP中進(jìn)行計(jì)算、處理.最終確保試樣中心點(diǎn)的定心精度(如圖 3 所示)。
將FPGA作為系統(tǒng)數(shù)據(jù)緩存、通信與控制中樞,通過(guò)EMIF 并行總線連接端口分別控制多個(gè)DSP芯片。FPCA實(shí)時(shí)并行計(jì)算實(shí)現(xiàn)標(biāo)準(zhǔn)數(shù)字信號(hào)處理算法的能力遠(yuǎn)強(qiáng)于DSP。因此,該伺服控制器中,標(biāo)準(zhǔn)數(shù)字濾波、數(shù)據(jù)轉(zhuǎn)換/讀取、設(shè)備信號(hào)保護(hù)等功能均在 FPCA 中實(shí)現(xiàn)。DSP 用來(lái)進(jìn)行其他復(fù)雜信號(hào)處理.比如 PIDF 控制算法等。
雙軸四通道伺服控制系統(tǒng)既可以實(shí)現(xiàn)每個(gè)通道獨(dú)立運(yùn)行,又可以實(shí)現(xiàn) 4 個(gè)通道協(xié)調(diào)加載以進(jìn)行原位控制。在這兩種不同的試驗(yàn)方式中,采用的控制策略也不相同。傳統(tǒng)的PID 控制方法因具有簡(jiǎn)單、可靠,不需要對(duì)象的精確數(shù)學(xué)模型等優(yōu)點(diǎn).在工業(yè)控制中得到非常廣泛的應(yīng)用。傳統(tǒng) PIDD 控制原理如圖 4 所示。
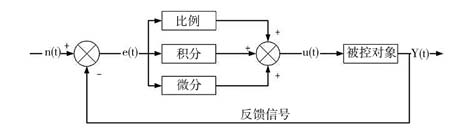
圖 4 PID控制原理圖
在雙軸四通道伺服控制系統(tǒng)中,傳統(tǒng)的 PID 控制算法主要用于每個(gè)通道獨(dú)立運(yùn)行的過(guò)程,如試驗(yàn)前試樣安裝調(diào)整以及需要單軸測(cè)試的試驗(yàn)等。
當(dāng)系統(tǒng)采用伺服電機(jī)時(shí),由于伺服電機(jī)驅(qū)動(dòng)器自帶內(nèi)閉環(huán),因此應(yīng)用經(jīng)典 PID 控制方式便可以達(dá)到較好的控制效果。當(dāng)系統(tǒng)采用液壓作動(dòng)器時(shí),由于液壓系統(tǒng)的非線性,僅使用傳統(tǒng) PID 控制方式很難達(dá)到預(yù)期的控制效果。本文采用增加微分負(fù)反饋及前饋方式,可以有效增加系統(tǒng)阻尼,減小超調(diào)量,同時(shí)因?yàn)椴捎们梆佈a(bǔ)償.提高了系統(tǒng)的跟蹤性能。系統(tǒng)控制原理如圖 5 所示,上位機(jī)軟件也相應(yīng)地增加了前饋及負(fù)反饋參數(shù)變量。
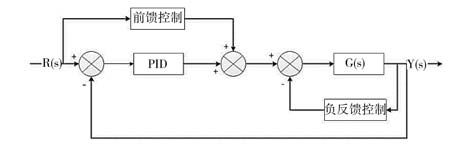
圖 5 系統(tǒng)控制原理圖
原位控制也可稱為定心控制,分為靜態(tài)與動(dòng)態(tài)兩種控制方式。靜態(tài)方式控制相對(duì)簡(jiǎn)單,對(duì)于精度要求不是特別高的情況,通過(guò)傳統(tǒng) PID 控制或者上位機(jī)軟件進(jìn)行相位補(bǔ)償就可以達(dá)到試驗(yàn)需求。但動(dòng)態(tài)控制過(guò)程中,由于頻響較高,導(dǎo)致控制精度下降,所以必須在下位機(jī)系統(tǒng)中進(jìn)行實(shí)時(shí)計(jì)算。本文采用增加 4 個(gè)小量程、高精度位移傳感器測(cè)量試驗(yàn)過(guò)程中的變形,因此整個(gè)系統(tǒng)需要兩套閉環(huán)控制算法,也就是 X軸和Y軸方向的兩套中心點(diǎn)偏差自身形成閉環(huán)控制,最終每個(gè)通道的被控對(duì)象收到的命令就是標(biāo)準(zhǔn) PID 輸出與中心點(diǎn)偏差 PID 輸出,原位控制原理如圖 6 所示。
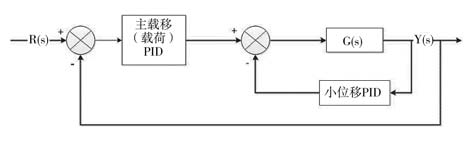
圖 6 原位控制原理圖
試驗(yàn)中若要保持試樣中心點(diǎn)不變,首先要測(cè)量中心點(diǎn)的位置。判斷中心點(diǎn)位置有兩種方式:一是通過(guò)主位移傳感器,二是每個(gè)作動(dòng)器都配置一個(gè)小量程、高精度位移傳感器.因?yàn)橹魑灰苽鞲衅髁砍檀?在變形較小的試驗(yàn)中無(wú)法滿足測(cè)量精度的要求,所以在雙軸四通道試驗(yàn)系統(tǒng)的設(shè)計(jì)中采用第二種方案。雙軸四通道試驗(yàn)系統(tǒng)具有 4 個(gè)服控制通道.4個(gè)通道可分為X軸和Y軸兩個(gè)方向,每個(gè)軸有對(duì)稱的兩個(gè)通道。試驗(yàn)過(guò)程中.在調(diào)節(jié)中心點(diǎn)時(shí),要分別確保每個(gè)軸的中點(diǎn)不變。

本文針對(duì)雙軸四通道伺服控制系統(tǒng)進(jìn)行了研究,全面分析了控制系統(tǒng)的硬件架構(gòu)及控制原理通過(guò)兼容性模塊設(shè)計(jì)方式,可適用于伺服電機(jī)驅(qū)動(dòng)及液壓作動(dòng)器驅(qū)動(dòng)。目前.該系統(tǒng)仍存在一定缺陷,如控制參數(shù)較多.對(duì)于非專業(yè)人員來(lái)說(shuō)調(diào)試難度較大。多通道試驗(yàn)系統(tǒng)未來(lái)的發(fā)展,勢(shì)必會(huì)將自適應(yīng)控制算法融人到控制系統(tǒng)中,以此來(lái)減少調(diào)試人員的工作難度。此外.增強(qiáng)系統(tǒng)帶寬,可以適應(yīng)更多的試驗(yàn)需求。















請(qǐng)先 登錄后發(fā)表評(píng)論 ~